 EN
EN  English
English 中文简体
中文简体 русский
русский Español
Español
Home / News / Industry News / What Motors Are Used in AGV Systems and How Do You Choose the Right AGV Drive Motor?

Application Industry
AGV
Automated robots

laser cutting

Logistics sorting

Photovoltaic power-station

Medical devices
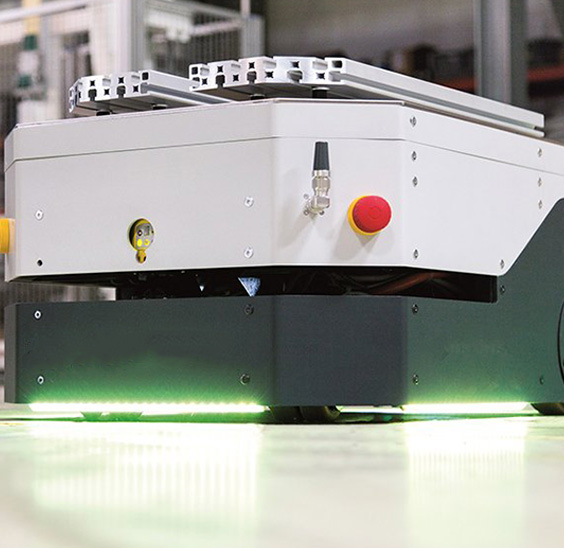
What Motors Are Used in AGV Systems and How Do You Choose the Right AGV Drive Motor?
The drive motor is the most critical electromechanical component in an Autonomous Guided Vehicle (AGV). It determines how the AGV accelerates, how precisely it positions itself, how much payload it can move, how long its battery lasts between charges, and how long the vehicle operates before the drive system requires maintenance. An AGV with an underpowered or incorrectly specified drive motor cannot meet its payload and speed requirements in production; one with poor motor efficiency drains the battery faster than the logistics operation can accommodate; one with a drive motor requiring frequent maintenance creates unplanned downtime in a system whose entire value proposition is reliable, continuous autonomous operation.
For AGV system integrators, robotics engineers specifying drive components, warehouse automation teams evaluating AGV platforms, and OEM equipment developers designing new AGV vehicles, understanding the motor technologies used in AGV drive systems — and the specification parameters that determine which technology fits which application — is essential knowledge for making the right component decisions. This guide covers AGV drive motor types, selection parameters, and the specific requirements that differentiate AGV motor applications from general industrial motor applications.
Why AGV Drive Motor Requirements Are Different from General Industrial Motor Requirements
AGV drive motors operate in a demanding and distinctive set of conditions that separate them from most general industrial motor applications:
Battery power supply. All AGVs are battery-powered — they operate from a DC battery pack (typically 24V, 36V, or 48V nominal) without connection to AC mains power. This fundamentally requires DC-compatible drive motors. AC motors can be used with onboard inverters, but the efficiency penalty of DC-to-AC inversion in a battery-powered system is significant. DC motors — and particularly BLDC motors — are the dominant choice because they accept battery power directly (or through a DC-DC converter) without the inversion penalty.
Frequent start-stop cycles. AGVs accelerate from rest to travel speed, navigate to a pick or deposit point, and stop — repeatedly, hundreds or thousands of times per day. The drive motor must handle this start-stop cycle without overheating or wearing excessively, which places demands on the motor's thermal management and, for brushed motors, the commutator and brush assembly that handles the high-current starting transients.
Bidirectional operation. AGVs must drive both forward and reverse — and must transition between directions cleanly without mechanical shock. The motor and its controller must support smooth bidirectional speed control. For steering-differential AGVs (where independent wheel speed control on left and right creates turning), the two drive motors must be precisely matched in their speed-torque response for accurate steering.
Precise speed and position control. Navigation accuracy in modern AGVs — particularly laser-guided (LiDAR), vision-guided, or magnetic-track AGVs — requires precise speed control and, in some systems, precise position feedback from the drive motor encoder. The motor must operate at consistent, controlled speeds across its payload and terrain range without speed hunting or instability.
High efficiency for battery life. In a battery-powered autonomous vehicle, motor efficiency directly determines operating time between charges. A drive motor system operating at 85% efficiency rather than 75% extends the vehicle's operating range by approximately 13%, which in a logistics application may be the difference between a vehicle completing its route within a battery cycle and requiring an unscheduled charge stop. Energy efficiency is a first-class specification requirement in AGV motor selection, not a secondary consideration.
The Main Motor Types Used in AGV Drive Systems
Brushless DC Gear Motors (BLDC): The Dominant AGV Drive Technology
Brushless DC gear motors are the overwhelmingly preferred drive motor technology for modern AGV systems. The BLDC motor replaces the mechanical commutator and brush assembly of a traditional brushed DC motor with electronic commutation — a motor controller reads the rotor position (via Hall effect sensors or encoder feedback) and switches the stator windings in the correct sequence to maintain rotation without any physical brush contact. This electronic commutation is what gives BLDC motors their defining advantages over brushed motors in the AGV context:
No brush wear = no brush maintenance. In a brushed DC motor, the carbon brushes pressing against the commutator rings wear continuously during operation. At high duty cycles — AGVs operating 20+ hours per day in three-shift logistics operations — brush replacement intervals can be reached within months, requiring scheduled downtime and replacement labor. BLDC motors have no brushes to wear; the only wear components are the motor bearings, which have service lives measured in thousands of hours. For an AGV fleet operating continuously, eliminating brush maintenance is a high operational cost and uptime advantage.
Higher efficiency. BLDC motors typically achieve 90–95% electrical-to-mechanical efficiency at their rated operating point, compared to 75–85% for equivalent brushed DC motors. In a battery-powered AGV, this efficiency difference directly translates to more working time per charge cycle.
Better thermal performance. BLDC motor heat is generated primarily in the stator windings, which are in direct contact with the motor housing, making heat dissipation efficient. Brushed motors generate heat at both the windings and the commutator/brush contact point, and the brush contact point is in the interior of the motor, where heat dissipation is less effective. BLDC motors sustain higher continuous duty cycles without overheating.
Precise speed control. Electronic commutation with encoder or Hall sensor feedback enables tight closed-loop speed control across a wide operating range. AGV navigation algorithms depend on accurate wheel speed feedback for dead-reckoning position estimation between absolute position fixes — BLDC motors with encoder feedback deliver this accuracy reliably.
Brushed DC Gear Motors: Cost-Effective for Lower-Duty AGV Applications
Brushed DC gear motors remain in use in AGV applications where the operating duty cycle is lower (not continuous 24/7 operation), where payload requirements are modest, and where the lower motor cost is a priority in cost-sensitive AGV platforms. In AGVs designed for light-duty internal logistics — small parts transport, document delivery, light manufacturing line support — the simpler control electronics required by brushed DC motors (no commutation controller needed) and their lower unit cost may justify their selection over BLDC alternatives despite the brush maintenance requirement.
Brushed DC motors also provide very high starting torque — higher than an equivalent-sized BLDC motor in some designs — which can be useful for AGVs starting under load on inclines. However, modern BLDC motor controllers can replicate this high starting torque behavior through field-oriented control strategies, reducing the brushed motor's historical advantage in this area.
Planetary Gear Motors for AGV Drive Wheels
Regardless of whether the motor element is brushed or brushless DC, AGV drive wheels almost universally use planetary gear reduction between the motor and the wheel. The planetary gear configuration is the preferred gearbox type for AGV applications for several reasons:
Planetary gears provide the highest torque density — the highest output torque for a given gearbox outer diameter — which is critical in AGV wheel assemblies where the complete motor-gearbox-wheel unit must fit within tight dimensional constraints on the vehicle chassis. The coaxial input/output alignment of a planetary gearbox allows a compact inline assembly: motor → planetary gearbox → drive wheel, all on a single axis, without the offset created by a spur gear or worm gear reduction.
Planetary gearboxes also provide high efficiency (92–97% per stage) compared to worm gear alternatives (typically 50–85% depending on ratio and lead angle), which is important in the battery-efficiency-critical AGV application. A worm gear AGV drive motor running at 70% gearbox efficiency loses 30% of the motor's electrical energy input to heat in the gearbox alone — an unacceptable penalty for a battery-powered vehicle.
Key Specification Parameters for AGV Drive Motor Selection
| Parameter | Typical AGV Specification Range | Why It Matters |
|---|---|---|
| Rated voltage | 24V / 36V / 48V DC | Must match AGV battery pack voltage; higher voltage allows higher power at lower current, reducing cable losses and motor temperature |
| Rated power | 50W – 1,000W per drive motor (depending on vehicle and payload) | Must be sufficient to accelerate the loaded vehicle on the steepest grade in the operating environment; underpowering causes motor thermal overload on inclines |
| Output speed at the wheel | 50–300 RPM (wheel shaft, after gear reduction) | Determines vehicle travel speed; wheel diameter and target AGV speed define the required output shaft RPM and therefore the required gear ratio |
| Continuous output torque | 5–200 Nm per drive motor (depending on payload and incline) | Must exceed the torque required to move the fully loaded AGV on the maximum grade at the rated speed; apply 2× safety factor for shock load margin |
| Peak torque | 2×–3× continuous torque | Required for acceleration from standstill under full load; motor and controller must sustain peak torque for the duration of the acceleration ramp without overheating or triggering overcurrent protection |
| Encoder resolution | 100–4096 PPR (pulses per revolution at motor shaft) | Determines odometry accuracy for dead-reckoning navigation; higher encoder resolution improves position estimation between absolute position fixes from navigation sensors |
| Efficiency | ≥ 85% overall (motor + gearbox) at rated operating point | Directly determines battery operating time; BLDC + planetary achieves 90%+ combined efficiency; prefer this over brushed + worm gear (60–70% combined) |
| IP rating | IP54 minimum for general indoor logistics; IP65 for wet or dusty environments | AGV motors are exposed to floor-level contaminants; inadequate ingress protection leads to premature bearing and winding failure from dust and moisture |
| Duty cycle | S1 continuous for 24/7 operations; S3 intermittent for single-shift | Motor thermal rating must match operational pattern; a motor rated for S3 intermittent duty will overheat in continuous S1 AGV applications |
How to Calculate the Required AGV Drive Motor Torque
The torque required to drive an AGV at constant speed on a flat surface must overcome rolling resistance; on an incline, gravity adds a grade resistance component. The calculation for a typical two-drive-wheel AGV:
Total vehicle weight: W = (AGV tare weight + maximum payload) × g [Newtons]
Rolling resistance force: F_rolling = W × μ_r, where μ_r is the rolling resistance coefficient (typically 0.01–0.02 for rubber wheels on smooth concrete; 0.02–0.05 for soft floors or rough surfaces)
Grade resistance force (for inclines): F_grade = W × sin(θ), where θ is the grade angle (for a 5% grade, θ ≈ 2.86°, sin(θ) ≈ 0.05)
Total drive force: F_total = F_rolling + F_grade
Required torque at drive wheel (per motor, assuming two drive motors): T_wheel = (F_total / 2) × r_wheel, where r_wheel is the drive wheel radius in meters
Required motor torque: T_motor = T_wheel / (i × η), where i is the gear reduction ratio, and η is the gearbox efficiency
For example, an AGV with 500 kg total loaded weight, 150mm diameter drive wheels, on a 3% grade, with a 25:1 planetary gearbox at 0.95 efficiency:
- W = 500 × 9.81 = 4,905 N
- F_rolling = 4,905 × 0.015 = 73.6 N
- F_grade = 4,905 × 0.03 = 147.2 N
- F_total = 220.8 N; per motor = 110.4 N
- T_wheel = 110.4 × 0.075 = 8.28 Nm
- T_motor = 8.28 / (25 × 0.95) = 0.35 Nm rated continuous torque
Add 2× safety factor for acceleration torque: peak motor torque requirement ≈ 0.70 Nm. A BLDC planetary gear motor with ≥ 0.70 Nm peak torque at 48V with a 25:1 ratio meets this requirement. The continuous torque rating should be verified against the continuous required torque (0.35 Nm at full payload on grade) with adequate thermal margin.
Frequently Asked Questions
How does the steering configuration of an AGV affect motor selection?
AGVs use several steering configurations, each with different motor requirements. Differential drive (two independent drive wheels, no steering wheel) creates turns by running the two drive motors at different speeds — this requires both motors to be closely matched in their speed-torque characteristics and controlled by a coordinated motor driver that can command differential speed on both wheels simultaneously. Tricycle steering (one steered drive wheel at the front, two passive rear wheels) uses a single drive motor with a separate steering actuator — motor selection is straightforward, but steering actuator integration must be considered. Omnidirectional drives (mecanum or omni wheels at each corner) use four individually controlled motors and allow lateral and diagonal motion — motor controllers must handle four-channel coordination, and the motors must have excellent speed matching characteristics across their operating range.
What encoder type is recommended for AGV drive motors?
Incremental encoders (quadrature A/B output) are the most common type for AGV drive motor odometry — they provide the pulse count per revolution that the navigation controller converts to wheel distance traveled and speed. Absolute encoders are occasionally used in applications requiring the controller to know position without homing after power-on, but for odometry (distance measurement), incremental encoders are standard. Resolution of 500–1000 PPR at the motor shaft is typically sufficient for good odometry accuracy with standard planetary gear reduction ratios. Higher resolution (2000–4096 PPR) improves odometry on low-ratio systems where the wheel shaft moves a larger fraction of a revolution per motor revolution.
Can AGV drive motors be used with regenerative braking?
Yes — BLDC motor controllers in AGV applications typically support regenerative braking, where the motor acts as a generator during deceleration, converting kinetic energy back into electrical energy that recharges the battery. Regenerative braking reduces battery consumption (particularly in stop-and-go AGV routes with frequent deceleration events), reduces brake wear, and allows faster deceleration without mechanical brake heat. The energy recovery efficiency of regenerative braking in a typical AGV application is 15–30% of the energy used for acceleration, meaningful in high-frequency short-route operations. Regenerative capability requires that the motor controller support bidirectional current flow and that the battery management system accepts regenerated charge current without entering overvoltage protection.
AGV Drive Motors from Zhejiang Saiya Intelligent Manufacturing
Zhejiang Saiya Intelligent Manufacturing Co., Ltd., Deqing, Zhejiang, manufactures BLDC planetary gear motors, brushed DC planetary gear motors, and complete AGV drive motor assemblies for autonomous guided vehicle applications. AGV product range covers drive motor units with integrated encoders at 24V, 36V, and 48V nominal battery voltages, in frame sizes from 32mm to 82mm diameter, with planetary gear reduction ratios from 5:1 to over 500:1, covering payload classes from light-duty small-part transport AGVs to heavy-duty material handling platforms. Custom AGV motor specifications — voltage, ratio, encoder resolution, mounting, IP rating, and connector — are available through the company's OEM/ODM development service.
Contact us with your AGV specifications — vehicle weight, payload, maximum speed, battery voltage, wheel diameter, and operating environment — to receive a drive motor recommendation and quotation.
Related Products: AGV Project Products | Brushless DC Gear Motors | Planetary Gear Motors | Precision Planetary Gearbox | Brushed DC Gear Motors
Related products
-

This 6W Induction AC Gear Motor is an efficient, compact and reliable small motor suitable for a wide range of industrial and household applications.Motor frame 60mm x 60mm making it easy to install ...
See Details -

The 6W brush DC gbear motor is designed for efficiency and versatility, suitable for various applications. With a compact frame size of 60mm x 60mm, it fits seamlessly into tight spaces. The motor ope...
See Details -

The 10W brush DC gear motor offers high performance and adaptability, for a range of industrial and hobbyist applications. With a frame size of 60mm x 60mm, this motor is designed to fit into confined...
See Details -

The 24V Brushless Gear Motor is a versatile and efficient motor designed for a range of applications. With dimensions ranging from 60mm x 60mm to 104mm x 104mm, this motor can fit into various equipme...
See Details -

The 32mm brushed planetary gear motor is a compact and efficient solution designed for various applications requiring high torque and precise control. With a diameter of 32mm, this motor is ideally su...
See Details -

The 42mm brush planetary gear motor is a versatile and efficient component widely used in various applications requiring precise torque and speed control. With a rated current ranging from 0.7 to 1.1A...
See Details -

The 32mm Brushless Planetary Gear Motor is a high-performance, compact solution ideal for applications requiring efficiency and reliability. Operating at a rated voltage of 24V and consuming 20W of po...
See Details -

The 42mm brushless planetary motor is a high-efficiency motor product that is widely used in various scenarios requiring precision transmission. The rated current of this motor is 1.3A and the rated t...
See Details -

The SPE series gearboxes, flange size range with 40, 60, 80, 120, and 160 models, are designed to provide efficient and robust power transmission solutions. These gearboxes feature a round output flan...
See Details -

The SPF series are with square output flanges, accommodating dimensions from 40mm to 160mm. These flanges are engineered to excel in various industrial applications, offering reliable performance acro...
See Details -

The 52mm brushed planetary gear motor is a compact and efficient solution designed for various applications requiring high torque and precise control. With a diameter of 52mm, this motor is ideally su...
See Details -

The 62mm brush planetary gear motor is a versatile and efficient component widely used in various applications requiring precise torque and speed control. With a rated current ranging from 2.5 to 5.5A...
See Details
CONTACT DETAILS
- TEL: 0086-0571-86951513/86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / [email protected] / [email protected]
- Office: Hangzhou Saiya Transmisson Equipment Co.,Ltd
- Office Address: Room 2201, Wanyin building, Hangzhou City, Zhejiang Province
- Factory: Zhejiang Saiya Intelligent Manufacturing Co., Ltd.
- Factory Address: No.35 Building , Zhongnan High-tech Yunhe Zhigu Industrial Park, Xinan town, Deqing county, Huzhou city, Zhejiang, China
QUICK LINK
PRODUCT
If You Are Intrested
In Our Products,
Please Consult Us
Copyright © Zhejiang Saiya Intelligent Manufacturing Co., Ltd. All Rights Reserved.
Custom Gear Reduction Motors Suppliers
